
Mini 360° x 189°
Hyper-Hemispherical 3D Lidar
$1,950.00




Mini 360° x 189°
Hyper-Hemispherical 3D Lidar
JT128 is a mini hyper-hemispherical 3D lidar specifically designed for robotics and industrial applications. It features 360° x 189° ultra-wide field of view, delivering all-around perception with no blind spots. With a 70% reduced size comparing to similar products, it can be easily embedded into various robots and industrial equipment to provide comprehensive 3D sensing capabilities.

*The appearance of products published on this website may vary due to screen display settings, production batches, and customization. Please refer to the actual sample/product; The product specifications shown on this website are typical values under specific test conditions and may slightly vary due to production batches, firmware and hardware versions, as well as application conditions. Please refer to final factory inspection. For product certification information, please refer to official certifications. Hesai reserves the right of final interpretation of the information on this website. *Please read the relevant safety precautions before using the product.
Channels
Ranging Capability
Point Rate
Field of View
Scanning frequency
Dimensions
Weight
Built inside

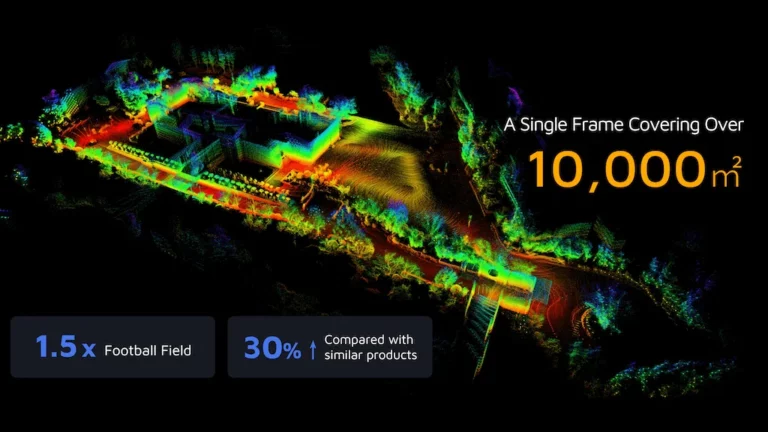
The JT128 features a detection range of up to 60 meters, with a single frame covering over 10,000 square meters — equivalent to 2 football fields.
The JT128 expands the field of view by 60% compared to similar products. When installed on robots or industrial equipment, it can seamlessly detect the ground, frontal, and overhead spaces simultaneously. With just one unit, it enables comprehensive spatial perception.
The JT128 is equipped with 128 channels in the vertical direction, with the platform supporting up to 256 channels. This enables enhanced environmental perception and dynamic detection of small obstacles.
As a high-precision 3D lidar, the JT128 combines both wide field-of-view and high channel-count to efficiently generate 3D SLAM. It provides precise positioning and navigation for robots and industrial equipment.
The JT128 features a detection range of up to 60 meters, with a single frame covering over 10,000 square meters — equivalent to 1.5 football fields.






| JT16 | JT128 | FTX | FT120 | ATX | AT128 | AT360 | ETX | XT16 | XT32 | XT32M | QT128 | OT128 | Pandar128 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Object Detection | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| Mapping | ● | ● | NaN | NaN | NaN | NaN | NaN | NaN | NaN | ● | ● | NaN | ● | ● |
| Object Identification | ● | ● | NaN | NaN | ● | ● | ● | ● | NaN | ● | ● | ● | ● | ● |
| Automotive Grade | NaN | NaN | ● | ● | ● | ● | ● | ● | NaN | NaN | NaN | ● | ● | ● |
| Channels | 16 | 128 | NaN | 120x160 | 256 | 128 | 360 | 1024 | 16/32 | 32 | 32 | 128 | 128 | 128 |
| Field of View | 360° X 40° | 360° X 99° | 140° X 180° | 100° X 75° | 140° x 20° | 120° X 25.4° | 18° X 120° | 120° × 20° | 360° X 31° | 360° X 31° | 360° X 40.3° | 360° X 105.2° | 360° X 40° | 360° X 40° |
| Range | 30m @ 10% Reflectivity | 20m @ 10% Reflectivity | 30m @ 10% Reflectivity | 22m @ 10% Reflectivity | 200 m @ 10% Reflectivity | 210m @ 10% Reflectivity | 300m | 400 m @ 10% Reflectivity | 80m @ 10% Reflectivity | 80m @ 10% Reflectivity | 80m @ 10% Reflectivity | 20m @ 10% Reflectivity | 200m @ 10% Reflectivity | 200 m @10% Reflectivity |
| Min Range | 0m | 0m | NaN | 0.1m | NaN | 1m | NaN | NaN | 0.05m | 0.05m | 0.5m | 0.05m | 0.3m | 0.3m |
| Weight | 0.199kg | 0.22kg | 0.2kg | 0.7 kg | 0.36 kg | 0.94 kg | 950g | 0.6 kg | 0.8 kg | 0.8kg | 0.49 kg | 0.7 kg | 2.2 kg | 1.63 kg |
| Accuracy | NaN | NaN | NaN | 5 cm | NaN | 5 cm | 5cm | NaN | 1 cm | 1cm | 1 cm | 3 cm | 3 cm | 5cm |
| Max Range | 100m | 25m | NaN | 50m | 300m | 260m | 250m | 400m | 120m | 120m | 300m | 50m | 230m | 200m |
| Resolution Horizontal | 0.6° | 0.45° | NaN | 0.625° | 0.08° | 0.1° - 0.2° | 0.06° - 0.12° | 0.05° | 0.09° - 0.36° | 0.09° - 0.36° | 0.09° - 0.36° | 0.4° - 1.6° | 0.1° - 0.4° | 0.1° |
| Resolution Vertical | 2.67° | 0.8° | NaN | 0.625° | 0.1° | 0.2° - 0.8° | 0.05° - 0.1° | 0.05° | 1° / 2° | 1° | 1.3° | 0.4° - 1.6° | 0.125° - 1.72° | 0.125° |
| Availability | Now | Soon | Q2 2026 | Until Q4'25 | Q4 2025 | Now | Soon | Now | Now | Now | Now | Now | Now | Now |
