
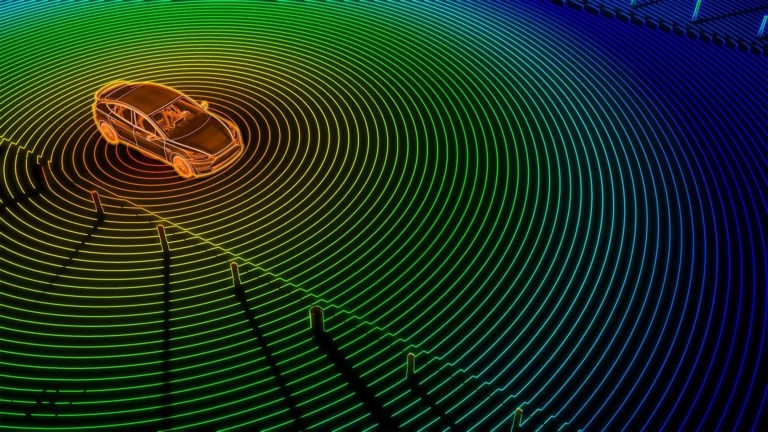
LiDAR (Light Detection and Ranging) technology is an advanced remote sensing method that uses laser light pulses to accurately measure distances and create detailed, high-resolution 3D maps of environments. From autonomous vehicles and robotics to industrial automation and smart infrastructure, LiDAR sensors provide centimeter-level precision for object detection, mapping, and real-time environment scanning. Whether you’re developing self-driving cars, enhancing warehouse automation, or implementing intelligent building systems, understanding LiDAR technology is essential for leveraging its powerful capabilities in distance measurement, point cloud generation, and spatial awareness.
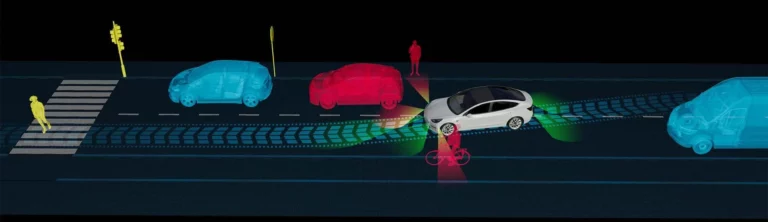
Lidar detects lanes by measuring the distance and reflectivity of the lane markings on the road. The Lidar sensor emits a laser beam that reflects off the road surface and lane markings. The reflected light is captured by the Lidar sensor and used to create a high-resolution 3D map of the surrounding environment. The Lidar software processes the data to identify the lane markings based on their reflectivity and location on the road. Once the lane markings are identified, the Lidar software tracks them in real-time and provide information to the autonomous driving system about the vehicle’s position relative to the lanes. The autonomous driving system then uses this information to adjust the vehicle’s trajectory and maintain its position in the lane.
is performed when the reflected laser light is captured by the Lidar sensor, and the time it takes for the light to return to the sensor is measured to determine the distance to each object. The Lidar software uses the data from multiple laser scans to create a high-resolution 3D map of the surrounding environment. The Lidar software then compares the real-time data from the Lidar to the pre-built 3D map to determine the vehicle’s location and orientation (position, or pose). The Lidar software uses this information to update the vehicle’s position in real-time and adjust its trajectory as needed. Mapping and localization are critical functions in autonomous driving because they enable the vehicle to navigate safely and efficiently in a wide range of environments. By providing accurate and real-time information about the vehicle’s location and surroundings, Lidar helps ensure that the vehicle stays on course and avoids collisions.
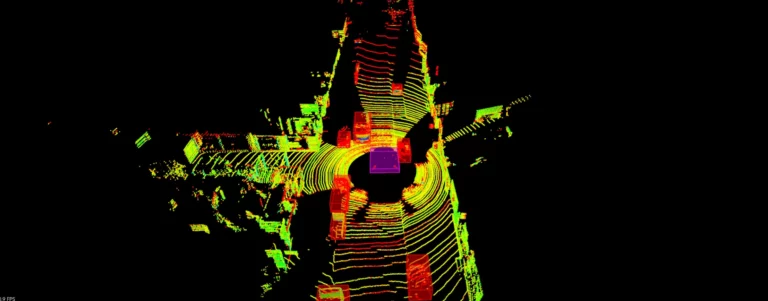
happens by scanning the environment and taking thousands or millions of data points (point cloud) regarding the distances of the points scanned. The LiDAR sensor repeats this process many times per second, scanning the environment in all directions. The LiDAR software processes the data to create a 3D map of the surrounding environment, including the location, size, and shape of objects in the environment. The autonomous driving system uses this information to detect and track objects in real-time, helping the vehicle navigate safely and avoid collisions. Lidar is a crucial technology for autonomous driving because it provides a real-time map of the environment around the vehicle, allowing it to make safe and informed decisions.

in autonomous driving is done by measuring the distance to the vehicle in front and then adjusting the vehicle’s speed to maintain a safe following distance. The LiDAR sensor emits laser beams that bounce off of the vehicle in front and measures the distance between the two vehicles. The Lidar software processes the data and calculates the speed and trajectory of the vehicle in front. The Lidar software then sends a signal to the autonomous driving system to adjust the vehicle’s speed to maintain a safe following distance. The autonomous driving system uses this information to adjust the vehicle’s speed, acceleration, and braking to maintain a safe following distance. The Lidar software continues to track the vehicle in front in real-time, updating the vehicle’s speed and trajectory as needed to maintain a safe distance. Adaptive cruise control is an important function in autonomous driving because it allows the vehicle to maintain a safe following distance while also optimizing fuel efficiency and minimizing traffic congestion. Lidar plays an important role in adaptive cruise control by providing accurate and real-time data about the vehicle in front, allowing the vehicle to make safe and informed decisions about its speed and trajectory.
is performed by a LiDAR system in a similar way or rather a combination of Object Detection and Adaptive Cruise Control. The Lidar software processes the data to identify and track the location, size, and shape of each object. The Lidar software then calculates the distance to each object and compares it to a predefined safety distance. If an object is detected within the safety distance, the Lidar software sends a signal to the autonomous driving or “Guidance, Navigation and Control” (GNC) system to adjust the vehicle’s trajectory and avoid the obstacle. The autonomous driving or GNC system uses this information to adjust the vehicle’s speed, direction, and trajectory to avoid collisions. The Lidar software continues to track the objects in real-time, updating the vehicle’s trajectory as needed to ensure safe navigation. Obstacle avoidance is a critical function in autonomous driving because it helps ensure the safety of the vehicle and its passengers. Lidar plays an important role in obstacle avoidance by providing real-time data about the surrounding environment, allowing the vehicle to make informed decisions and adjust its trajectory accordingly.
LiDAR is the right technology choice if you want to achieve or enhance the following features in your application:
Accurate distance measurements: Lidar provides accurate distance measurements and creates detailed 3D maps of its surroundings with sub-centimeter resolution. This makes LiDAR a valuable tool for applications such as surveying, mapping, and construction.
Object recognition: Lidar is used to detect and recognize objects in the environment. By analyzing the reflected laser light, Lidar provides the shape and location of objects as a dataset, which is referred to as Point Cloud. The point cloud is processed by specialized software applications which recognize, identify, classify or track objects. This property of LiDAR is useful for applications such as autonomous vehicles and robotics.
Safety and security: Lidar helps improve safety and security in various applications, such as aviation, traffic monitoring, and perimeter security. By providing accurate distance measurements and object recognition capabilities, Lidar helps detect and avoid potential hazards and intrusions.
Efficiency and productivity: Lidar helps improve efficiency and productivity in various industries, such as forestry, agriculture, and mining. By creating point clouds, i.e. detailed 3D maps of environments, Lidar data (point cloud) that is processed by application software helps optimize operations and improve decision-making.
Versatility: Lidar is used in various environments and conditions, such as day or night, indoors or outdoors, and in different weather conditions. This makes LiDAR a versatile tool for a wide range of applications.
When selecting a LiDAR it is important to reduce your system requirements to the following characteristics: Detection range, distance accuracy, linearity, horizontal and vertical resolution, size and weight. Please refer to our LiDAR selection table for these important characteristics of the LiDAR sensors that we offer when selecting the best LiDAR for your application.
In many of the use cases or applications, the LiDAR data is processed with AI or Machine Learning Techniques as a strong and more popular alternative to classical, computation intensive analytical models. Constructing AI models on Lidar data involves a combination of data preparation, feature engineering, and machine learning techniques. The general steps involved in building an AI model on Lidar data are:
The first step is to collect Lidar data from the target environment. This involves using a Lidar sensor to capture the 3D point cloud data from the environment of interest.
The raw Lidar data may contain noise, outliers, and missing values that need to be processed and cleaned before the data is used for machine learning. This step involves removing noise and outliers, filtering data, and interpolating missing values.
Feature extraction involves identifying the relevant features from the Lidar data that are useful for the machine learning model. This step includes extracting geometric features such as surface normals, point density, and curvature, as well as statistical features such as mean, variance, and correlation.
Once the Lidar data is prepared, the next step is to manually label or annotate the objects of interest in the point cloud data. This involves identifying the objects, such as cars, pedestrians, buildings, and roads, and creating a bounding box or polygon around each object. Annotating pound clouds require a different annotation approach than those on image files, as objects in 3D space need to be represented using bounding boxes or polygons, rather than 2D rectangles. The objects in point cloud data have higher dimensionality and complex geometries, making it more challenging to annotate accurately. For high accuracy annotation, 3D, mesh or solid models of the objects might be necessary. The workflows are often more challenging due to the size of the datasets that are of interest as well.
After labeling the objects, the data needs to be verified and checked for accuracy and consistency. This step involves reviewing the labeled or annotated data to ensure that it is correct and meets the desired level of quality.
Once the labeled data is verified, it is split into training, validation, and test sets for use in supervised machine learning.
The next step is to choose a suitable machine learning model for the application. The model selection depends on the problem statement, available data, and the desired level of accuracy and performance.
Once the machine learning model is selected, the next step is to train the model using the prepared Lidar data. This involves splitting the data into training and validation sets, setting model hyperparameters, and fitting the model to the data.
After training the model, the performance of the model is evaluated using test data. This step involves measuring the accuracy, precision, recall, and F1 score of the model.
Once the model is trained and evaluated, it is be deployed in the target environment for real-time processing and decision-making.
Building an AI model on Lidar data involves a combination of data preparation, feature engineering, and machine learning techniques. The specific techniques used depend on the application, available data, and desired level of accuracy and performance.
Although the popularity of LiDAR technology has increased by semi-autonomous or fully autonomous vehicles, depending on the application, it is possible to find various types of LiDARs that are optimized for the specific use case:
Also known as ground-based Lidar, is typically used for surveying and mapping. It uses a stationary tripod or mobile platform to scan the environment and create high-resolution 3D models.
Airborne LiDAR is used for mapping large areas such as forests, coastlines, or urban areas. It is mounted on aircraft or drones and provides high-resolution 3D maps of terrain and structures.
Bathymetric LiDAR is used for mapping underwater features such as ocean floors and riverbeds. It uses lasers to measure the depth and shape of underwater surfaces.
Measures the velocity of objects in the environment by analyzing the shift in frequency of the reflected laser light. It is often used for atmospheric and wind measurements.
Also known as Imaging Lidar, captures a complete 3D image of the environment in a single pulse. It is used for object recognition and tracking in applications such as autonomous vehicles and robotics.
Industrial Lidar is used for industrial applications such as quality control, inspection, and automation. It provides precise measurements of objects and structures for manufacturing and assembly.
LiDAR systems are expensive, especially high-end systems with high accuracy and resolution. This limits their use in some applications. The accurate distance measurements come at a price, typically starting at thousands of dollars for 3D scanning LiDARs. This cost is lower in 2D LiDAR technology, but you would be limited to one horizontal plane for distance measurements, compared to over hundred planes in a 3D LiDAR.
LiDAR has a limited range compared to some other remote sensing technologies such as radar. This means that in some applications, Lidar may not be able to detect objects at long distances. Typically LiDAR ranges are hundreds of meters.
LiDAR cannot penetrate opaque materials such as walls or fog, which limits its effectiveness in certain environments.
LiDAR systems are usually complex to operate and maintain, requiring specialized knowledge and expertise.
LiDAR is sensitive to environmental conditions such as rain, snow, or dust, which affects the accuracy and reliability of the data.
LiDAR is vulnerable to interference from other sources of light or electromagnetic radiation, which affects its performance.
Despite these tradeoffs, LiDAR technology continues to evolve and improve, and its many benefits make it a valuable tool in a wide range of applications. LiDAR technology remains to be the ONLY tool in some of the applications.
LiDAR technology is complex and requires a significant amount of technical expertise to properly design, implement, and operate. An expert can provide guidance and advice on the technical aspects of the technology, such as range, accuracy, resolution, and sensitivity, to help ensure that the system meets your requirements.
LiDAR technology is used in a wide range of applications, and each application has its own unique requirements and challenges. An expert can help you evaluate the specific needs of your application and determine whether Lidar technology is the best solution, or if other technologies or approaches may be more suitable.
LiDAR systems can be expensive, and their costs vay widely depending on the specific application and requirements. An expert can provide guidance on the cost and budget considerations for your application, and help you balance the system’s capabilities with its cost and your budget.
Software support is necessary in a LiDAR system because the software plays a critical role in processing and analyzing the data collected by the sensor. Some of the reasons why software support is essential are:
1. Data processing: The raw data collected by the LiDAR sensor is often large and complex, and requires advanced software algorithms to process and analyze. The software must be able to filter, classify, and interpret the data to create a meaningful 3D map of the environment.
2. Real-time operation: LiDAR systems often operate in real-time, requiring the software to process and analyze the data quickly and accurately. The software must be optimized for high-performance computing to ensure that the system operates in real-time without delays or errors.
3. User interface: The software provides the user interface for the LiDAR system, allowing users to view and interact with the 3D maps, adjust system settings, and configure the system for specific applications. The software must be user-friendly and intuitive to use, making it easy for operators to control and monitor the system.
4. System integration: The software must be compatible with the hardware components of the Lidar system, including the sensor, processor, and other peripherals. The software must be designed to integrate seamlessly with the hardware, ensuring that the system operates reliably and efficiently.
For a Lidar system to function effectively and reliably, software support is critical. The software provides the tools and functionality needed to process and analyze the data collected by the sensor, and enables the system to operate in real-time and integrate with other hardware components.
Depending on your application and location, there may be regulatory and legal requirements that govern the use of Lidar technology. An expert can help you understand these requirements and ensure that your system is in compliance with all applicable regulations and laws.
Consulting with CRATUS will help you make an informed decision about the use of LiDAR technology for your application, and ensure that the system is designed and implemented to meet your specific needs and requirements.
Interested ?
We would be pleased to send you detailed information about our products or services.
Simply enter your details in the contact form below and we will get in touch with shortly.
CRATUS respects your personal information and keeps it safe. By sending this form, you consent to allow CRATUS to store and process your personal information as stated in our Privacy Policy.
GET IN TOUCH
One of our experts will be communicating with you shortly. We are committed to understanding your application and providing support, tailored to your specific requirements.