
Access real-time sensor data with SXMCA
Developer edition for system integration
LiDAR, IMU, RTK, SLAM, Navigation data
$12,500.00


Access real-time sensor data with SXMCA
Developer edition for system integration
LiDAR, IMU, RTK, SLAM, Navigation data
TimeSync 3.0
Smart Resume
Real-Time Color
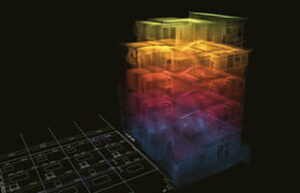
Point Cloud &
Scan Report
Panoramic
Measurement
3DGS
Reconstruc tion
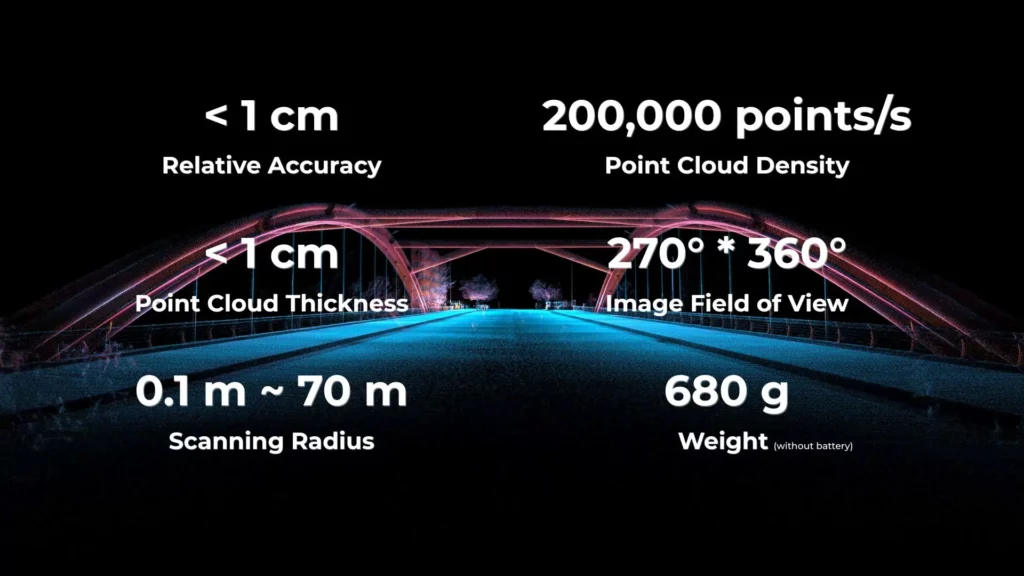
A built-in RTK module provides centimeter-level absolute accuracy.
360° LiDAR ensures complete coverage without blind spots.

Flagship panoramic cameras with 3DGS technology enable seamless view switching. One-click export to JPG, LAS, RCP, and PLY.
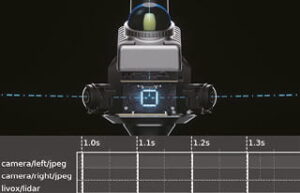
Hardware-level multi-sensor sync achieves microsecond alignment, ensuring native data consistency and precise, reliable fusion.
Trained on 2,000+ devices and 100 million m² of real-world data, AI-powered SOTA-SLAM (Spatial Omni-Temporal Adaptive) algorithm ensures robust mapping.
Two 12MP Sony cameras capture high-quality images to create colorized point clouds.
IP54 Protection for enabling outdoor scans and fieldwork
with a relative accuracy better than 1 cm









Real-time point cloud preview,quick quality
checks,anddevice status at a glance.
One-click point cloud processing with optimization, editing, and multi-format export. Seamlessly integrates with mainstream softwares.
Real-time point cloud and 3DGS computation with onlinepreview,supporting cloud collaboration and reducing local hardware dependency.
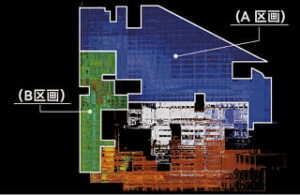
DATA RESULTS
High planarity of horizontal point clouds
Accurate vertical alignment
SXMCA DEV is a developer edition mounting base for SXMCA systems, designed for drone or stationary installation with data over Ethernet and power connections. It is mainly used by integration teams that need access to real time LiDAR, IMU, RTK, SLAM, and navigation data from an SXMCA based scanning system.
SXMCA DEV should be positioned as an integration focused version of the SXMCA system, not only as a standard handheld scanner. It is designed as a drone or stationary mounting base with developer level access to sensor data, making it suitable for robotics, automation, mapping payloads, and custom system integration.
SXMCA DEV is useful for drone based LiDAR scanning because it provides a mounting and connection base for integrating SXMCA data capture into aerial platforms, with access to RTK, SLAM, IMU, and navigation data.
Yes. SXMCA DEV is designed for drone or stationary mounting. This makes it relevant for fixed position scanning, infrastructure monitoring, site documentation, robotics test setups, and research environments where teams need continuous or repeatable 3D data capture.
SXMCA DEV is positioned for access to real time sensor data including LiDAR, IMU, RTK, SLAM, and navigation data. This makes it useful for developers building custom workflows around mapping, localization, robotics perception, digital twins, and autonomous system testing.
Yes. The SXMCA system includes a built in RTK module that supports centimeter level absolute accuracy. This is important for drone mapping, stationary scanning, and georeferenced point cloud workflows where position accuracy matters.
360° LiDAR matters because it helps the SXMCA system capture complete spatial coverage without blind spots. For drone or stationary integration, this can support full scene awareness, digital twin capture, facility mapping, construction documentation, and robotics environment scanning.
SXMCA DEV is relevant for robotics and autonomous system development because it exposes key sensor data streams such as LiDAR, IMU, RTK, SLAM, and navigation data. It supports applications across robotics, automation, and intelligent system development workflows.
The SXMCA ecosystem supports SXMCA GO for real time point cloud preview and device checks, SXMCA Studio for point cloud processing, optimization, editing, and export, and SXMCA Cloud for online preview, cloud collaboration, and 3DGS computation. This makes SXMCA DEV relevant for teams that need both data capture and post processing workflows.
A team should choose SXMCA DEV when it needs an SXMCA based LiDAR system for custom integration, drone mounting, stationary mounting, robotics development, real time sensor data access, or georeferenced mapping workflows. It is most relevant when the project requires access to LiDAR, IMU, RTK, SLAM, and navigation data rather than only handheld field scanning.
CONTACT US / BUY
One of our experts will be communicating with you shortly. We are committed to understanding your application and providing support, tailored to your specific requirements.
Receive Quote
One of our experts will be communicating with you shortly. We are committed to understanding your application and providing support, tailored to your specific requirements.